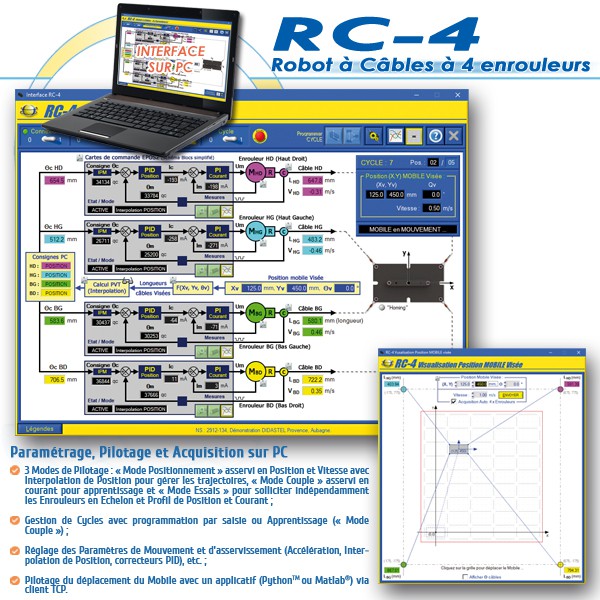
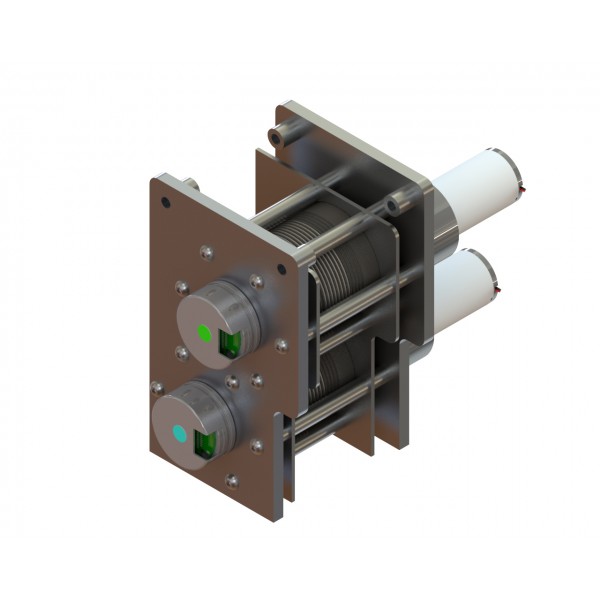
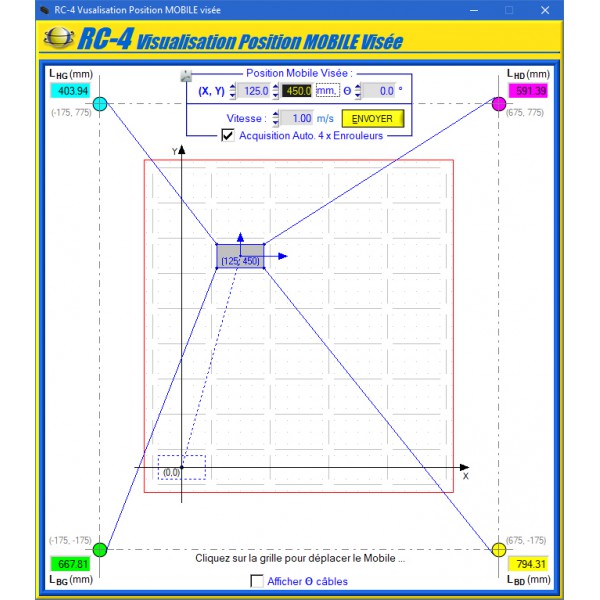
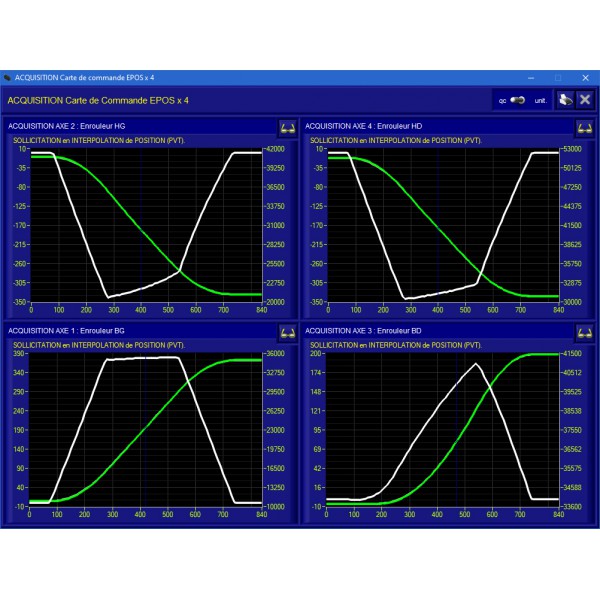
Le Robot à Câbles RC-4 utilise 4 organes flexibles reliés chacun à un Enrouleur disposant de sa propre commande. Ces 4 câbles fonctionnent simultanément pour déplacer et orienter un Mobile (lestable) dans un plan vertical. Ces câbles ne pouvant que « tirer » le Mobile, le défi et de garder tous les câbles tendus pour déplacer une charge avec vitesse et précision. DIDASTEL a conçu le RC-4 pour vous permettre de relever ce défi et vous approprier les lois de commande de ces Robots : synchronisation des trajectoires câbles, asservissement de Position et Vitesse avec Interpolation de Position.
Un mode avec les câbles asservis en courant (effort) permet de programmer un cycle par Apprentissage.