MONO-AXE")
Issu de la technologie des Cobots (« Robots collaboratifs »), "CoMax" permet d’assister l’homme au travail et de diminuer les risques de TMS (troubles musculo squelettiques).
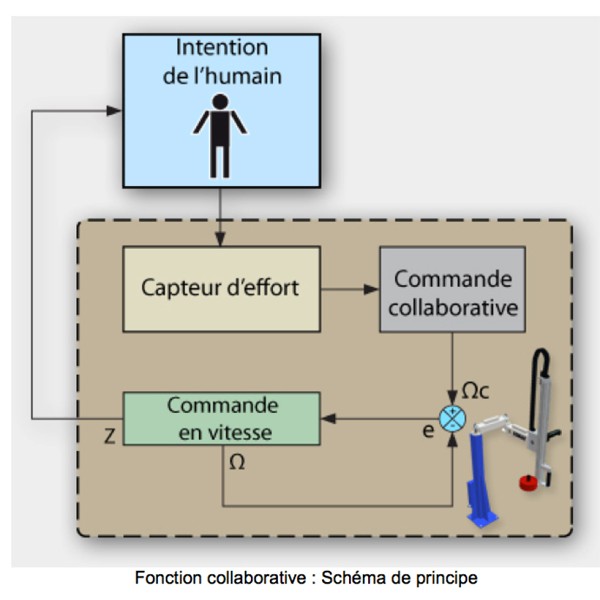
"CoMax" est continuellement piloté par l’homme au moyen d’une commande intuitive et collaborative permettant de réaliser une tâche sans efforts d’appui et de levage.
A des fins ergonomiques, l'objectif de la Fonction collaborative est de faire ressentir une masse légère à l'usager même si le robot avec lequel il
collabore déplace une lourde charge. Afin que l'humain puisse coopérer de façon intuitive avec le robot, l'humain est dans la boucle de commande et il interagit avec le robot.
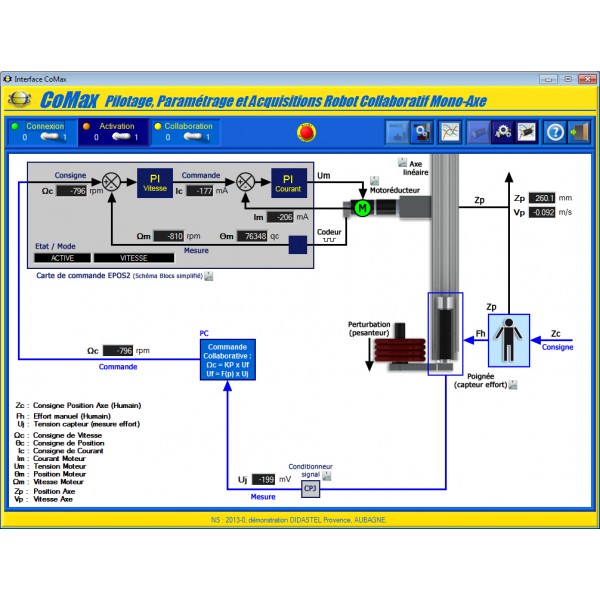
La commande collaborative consiste à mesurer l'intention de l'humain, force appliquée sur la poignée de manipulation (capteur d'effort), et de
calculer (consigne de vitesse) la réaction dynamique du robot correspondante.
SOUS-SYSTEME DISPONIBLE :
- "POIGNEE" (conditionnement signal capteur)