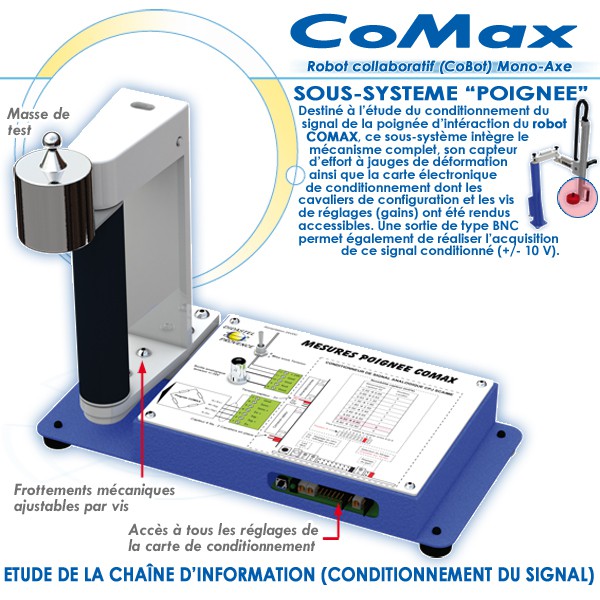
Le sous-système "POIGNEE" est destiné à l'étude de la poignée d'intéraction du robot "CoMax" et au conditionnement du signal de son capteur.
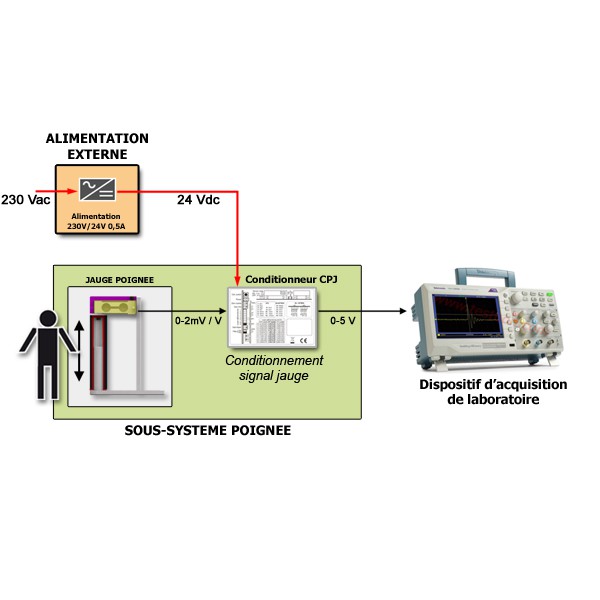
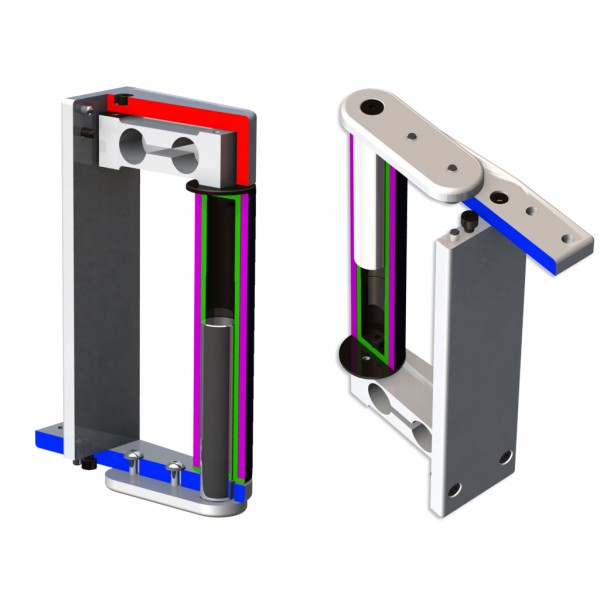
Ce sous-système intègre le mécanisme complet de la poignée d'intéraction, son capteur d’effort à jauges de déformation ainsi que la carte électronique de conditionnement dont les cavaliers de configuration et les vis de réglages (gains) ont été rendus accessibles.
Une sortie de type BNC permet également de réaliser l’acquisition de ce signal conditionné (+/- 10 V) à l'aide d'un oscilloscope.