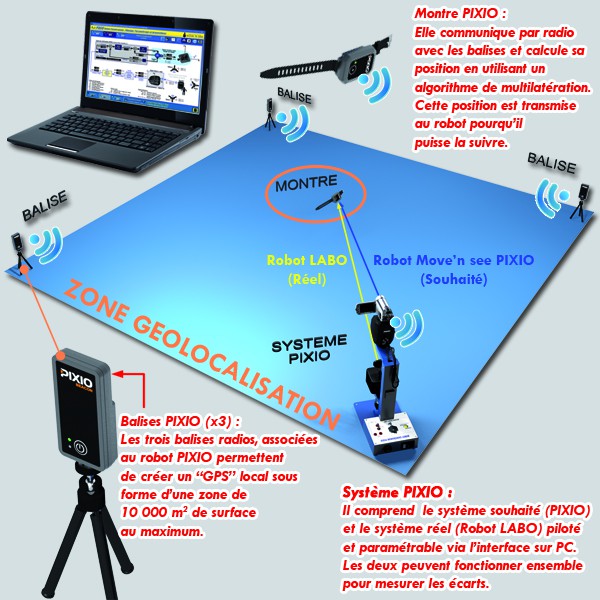
"PIXIO" est un robot caméraman “suiveur” qui filme aussi bien en intérieur qu’en extérieur. Grâce à son propre dispositif de géolocalisation utilisant des balises radios, ce robot est capable de suivre sa cible équipée d’une montre spéciale jusqu’à 100 mètres.
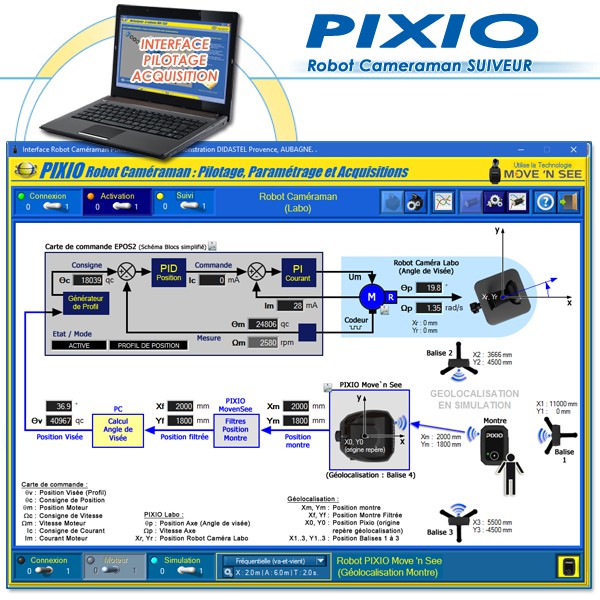
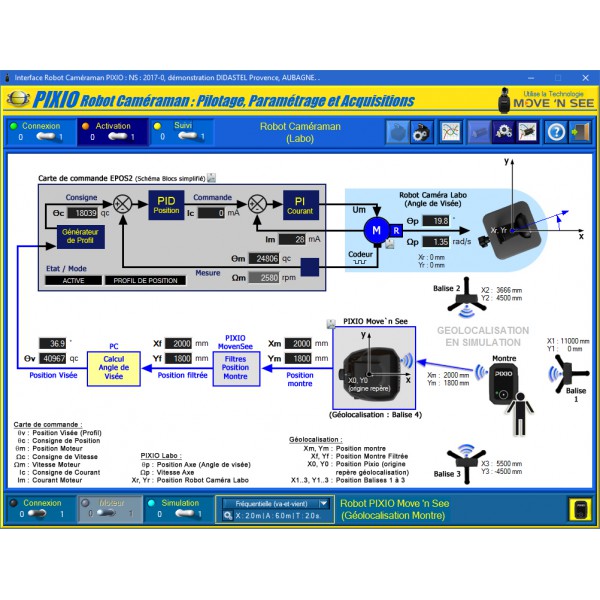
Ce système comporte un robot "PIXIO" (SYSTEME SOUHAITÉ) fonctionnel, conçu par la société MOVE'N SEE et modifié spécialement pour DIDASTEL PROVENCE (Accès en temps réel et en fonctionnement à ses données de géolocalisation par liaison USB).
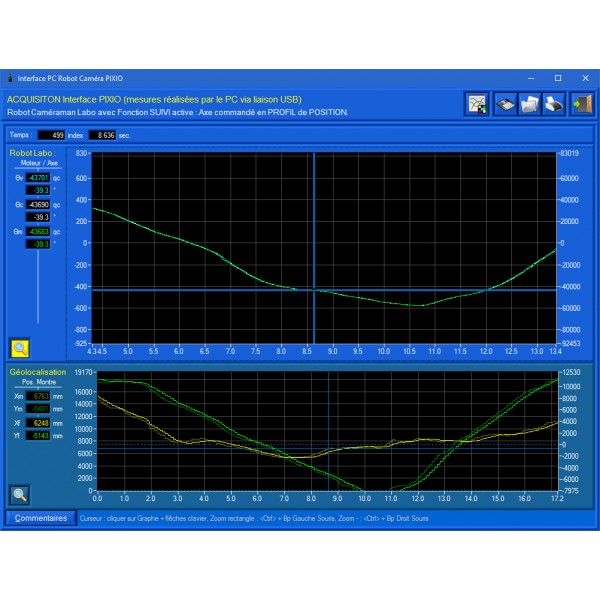
Sur le même châssis et aligné sur le même axe, un robot "LABO" (SYSTEME RÉEL) reprenant les caractéristiques du système souhaité, s'utilise soit "seul" en banc d'asservissement ou bien en association avec le robot "PIXIO" et ses données de géolocalisation pour suivre la montre et ainsi mesurer les écarts entre les deux systèmes.
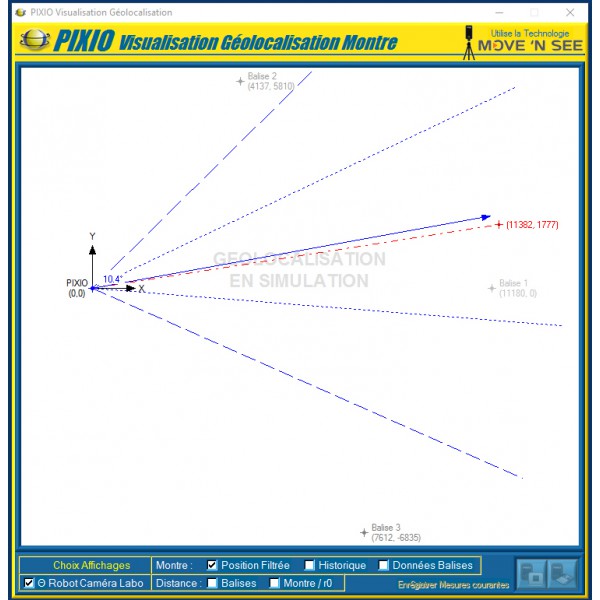
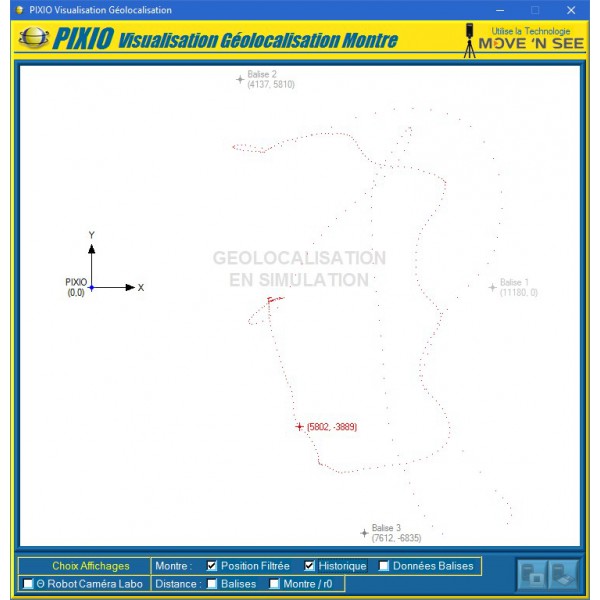
Le système est accompagné de tous ses accessoires (balises radios et montre spéciale) permettant de mettre en oeuvre un "GPS LOCAL" en laboratoire.