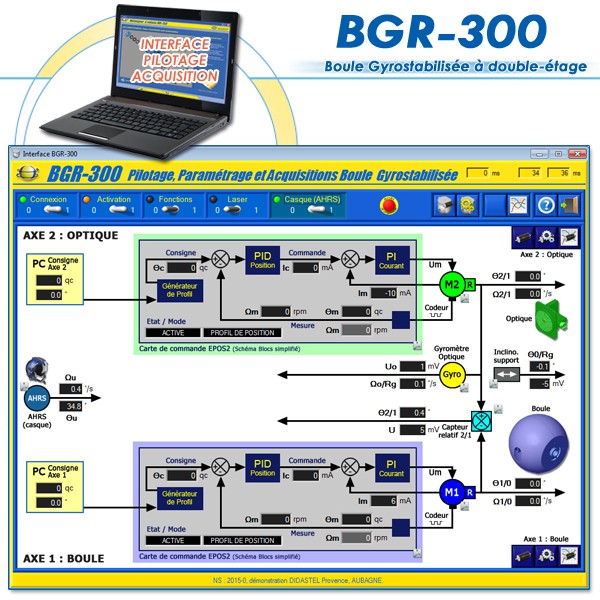
L'ENSEMBLE MÉCATRONIQUE “BGR-300” permet de réaliser la fonction principale de gyrostabilisation double-étage de la boule optronique "Euroflir" (TM) utilisée sur les aéronefs.
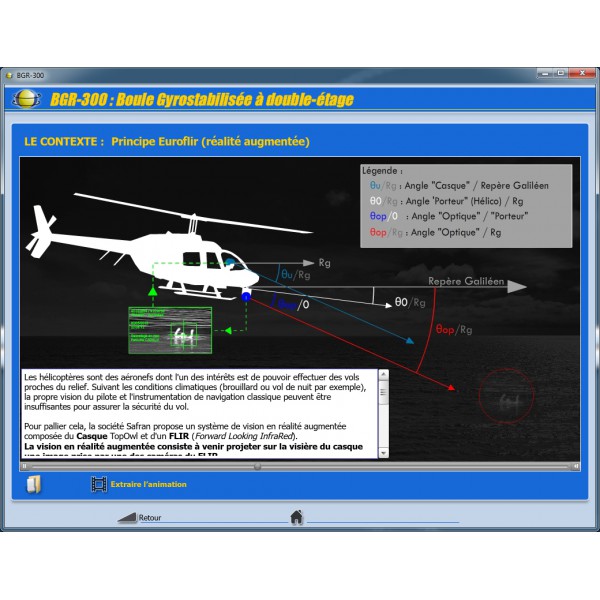
Le dispositif, dit à “réalité augmentée” "Euroflir" consiste à projeter sur la visière du casque d’un pilote d’aéronef une image délivrée par une boule optronique gyrostabilisée fixée sous un aéronef, par exemple un hélicoptère.
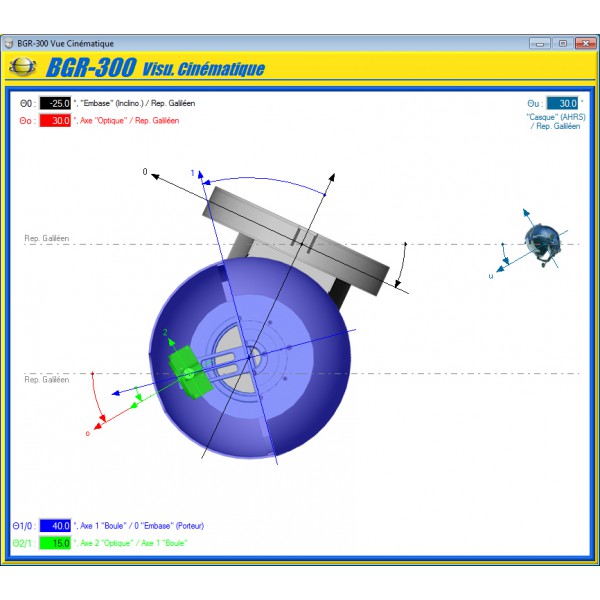
Cet ensemble permet aux optiques de conserver une même ligne de visée par rapport au référentiel terrestre, quels que soient les mouvements de l’hélicoptère (porteur).
L’angle de visée des optiques étant commandé par le casque du pilote, l’image numérique se superpose alors parfaitement à la propre vision du pilote.
Le système "BGR-300" propose de réaliser la fonction principale de gyrostabilisation double-étage de l'Euroflir (TM) sur un seul axe (tangage ou lacet) pilotée par les lunettes AHRS (casque pilote).
Le support avec sa poignée permet de simuler les mouvements du porteur.