CONTENU :
1 Attelle de Mobilisation du Genou « CPM-130 » fonctionnel équipé de :
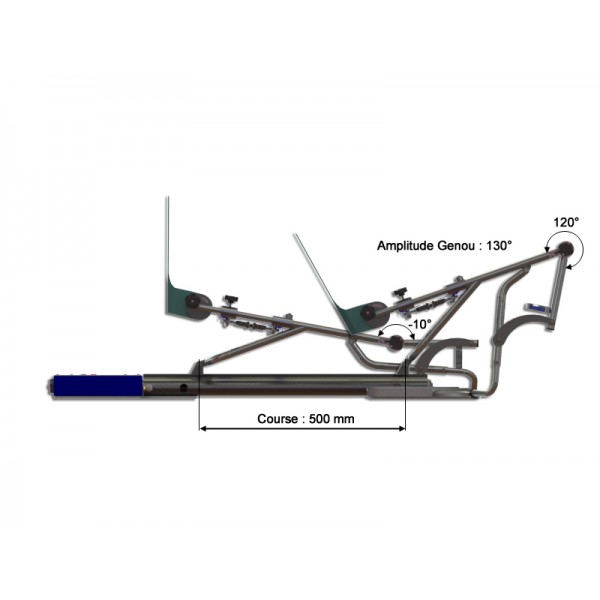
- Mécanisme réel Kinetec, amplitude Genou de -10 à 120°
- Actionneur linéaire à vis à billes et Motoréducteur Maxon CC 24V 40W 1:16
- Capteur angulaire sans contact pour mesure position angulaire du Genou
- Capteur d’Effort en traction (type “S” 50 Kg) pour mesure effort du Genou
- Carte d’asservissement EPOS de chez MAXON
- Connexion par liaison USB
- Pupitre avec Points de mesure Tension Moteur
Accessoires :
Logiciels dématérialisés :
- 1 Interface PC de Paramétrage, Pilotage et Acquisition (liaison USB).
Ressources dématérialisées :
- Dossier Technique "CPM-130" ;
- Manuel Interface de Paramétrage, Pilotage et Acquisitions ;
- Dossier "Professeur" (doc. constructeurs, plans, schémas, publications, etc.)
- Activités Pédagogique (en cours de rédaction).
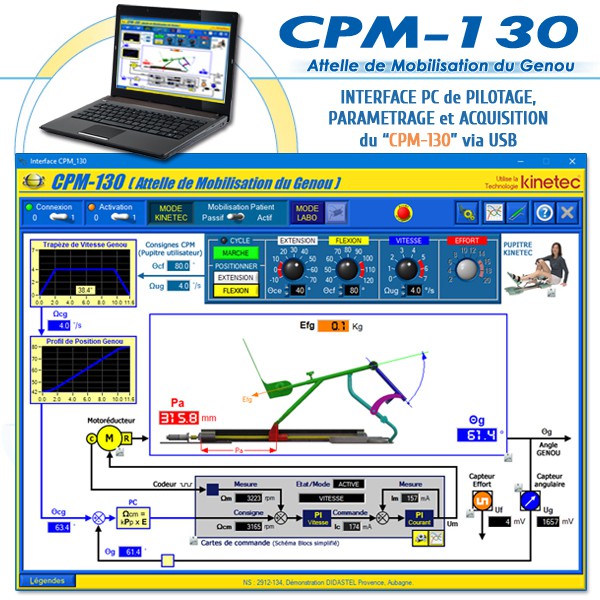
INTERFACE PC de Pilotage, Paramétrage et Acquisition :
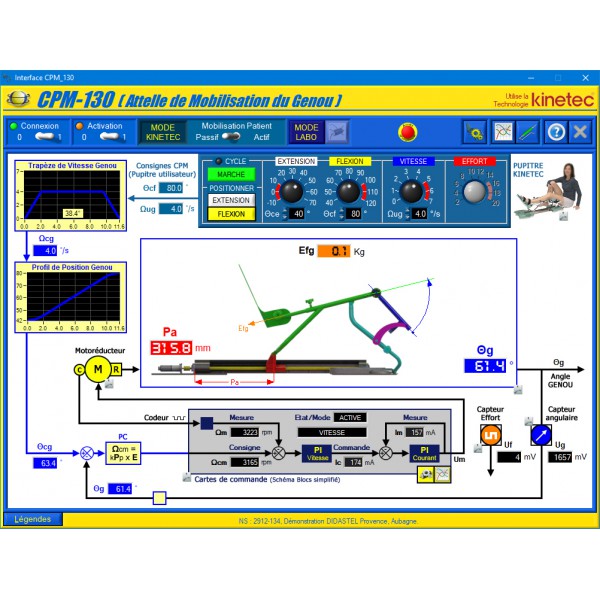
- Pupitre de pilotage des fonctions de mobilisation en Mode Kinetec
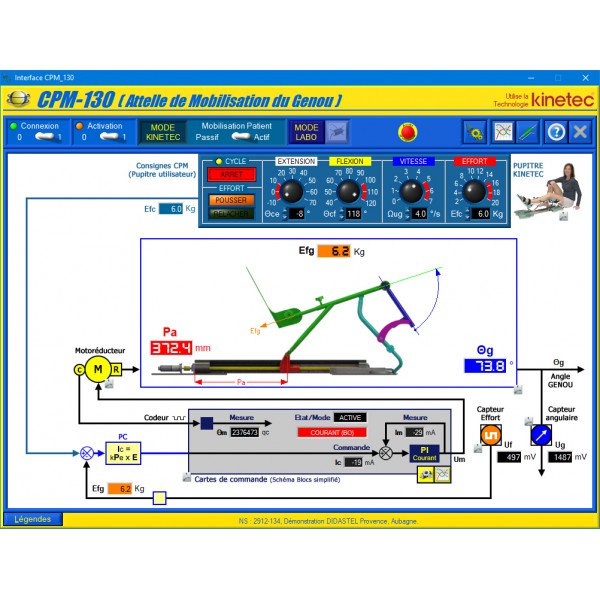
- Paramétrage des commandes en Mode Kinetec : Patient PASSIF (Trapèze de vitesse) ou Patient ACTIF (Boucle d’effort)
- Visualisation des commandes et boucles de régulation et grandeurs physiques sur synoptique
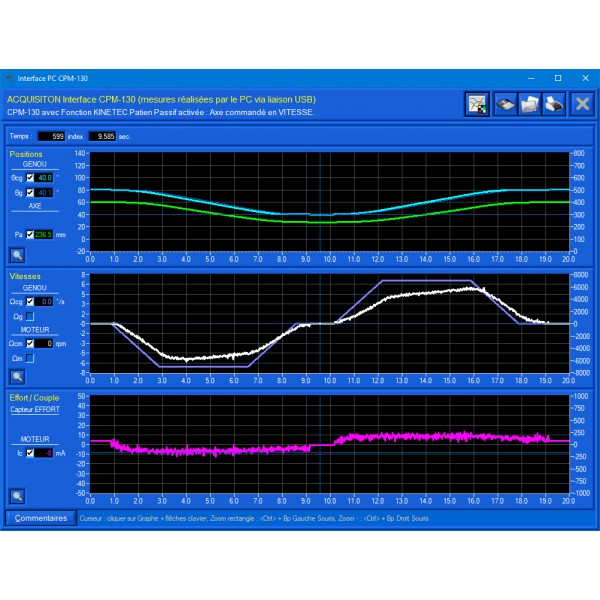
- Visualisation dynamique (graphes) des grandeurs physiques (Position, Vitesse, Courant, Effort, etc.)
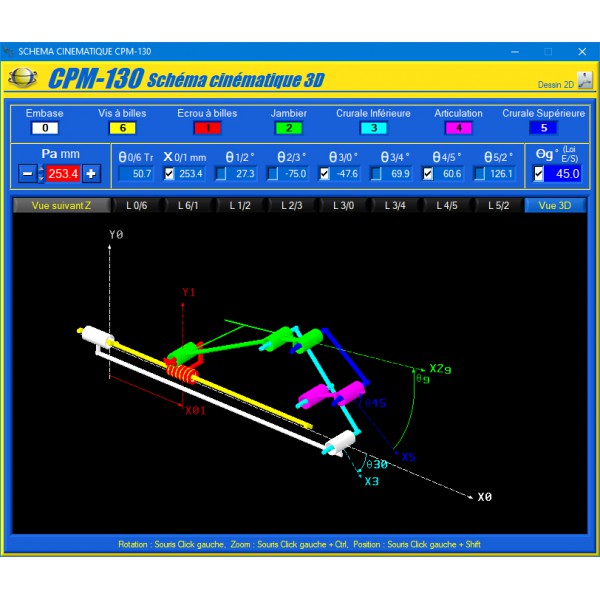
- Schéma cinématique 3D animé en temps réel (loi E/S)
- Sollicitations de l’Axe linéaire avec Acquisition des réponses en Mode LABO : asservissement en Courant, Vitesse, Position et Profil de Position (Trapèze)
- Réglage des paramètres d’asservissement (PI Courant, PI Vitesse et PID Position)
- Etc.
ACTIVITES PEDAGOGIQUES :
TP 1.1 Vérification de performances
Objectif : Vérifier le respect de certaines exigences imposées pour ce système, éventuellement en quantifiant des performances et en les comparant aux valeurs limites attendues.
Termes-clés :
- Identification des grandeurs d’entrée, sortie, consignes, etc…
- Vérification d’exigences
- SYSML : Diagramme d’exigences, diagramme de définition de blocs
- Diagramme chaîne d’énergie – chaîne d’information
TP 1.2 Commande Sécurisée – consigne en trapèze de vitesse
Objectif : Définir un mouvement permettant d’amener le patient d’une position d’extension de la jambe vers une position de flexion (ou inversement), dans les meilleures conditions thérapeutiques et de sécurité.
Termes-clés :
- Interprétation de schéma-blocs
- Observation expérimentale de non linéarité de la loi ES
- Elaboration d’une consigne en trapèze de vitesse. Avantages.
TP 1.3 Approximation de loi entrée-sortie par résolution dichotomique
Objectif : Etablir une approximation numérique de la loi entrée-sortie du système, et la confronter à une mesure expérimentale à fin de validation.
Termes-clés :
- Graphe de liaisons
- Loi ES géométrique
- Résolution dichotomique
- Vérification expérimentale de loi ES
TP 2.1 Modélisation - Réglage correcteur
Objectif : Déterminer les paramètres de correction de l’asservissement de l’attelle CPM-130, en vue d’obtenir un pilotage de vitesse précis, suffisamment rapide, et stable.
Termes-clés :
- Complétion d’un schéma-blocs par modèle de connaissance
- Energie cinétique, inertie équivalente
- Modèle de frottement, quantification expérimentale
- Comparaison d’un modèle par schéma-blocs à des résultats expérimentaux sur un échelon de vitesse, quantification d’écarts
- Correction proportionnelle : mesure d’écart statique, lien avec le « tableau précision ». Modélisation et expérience
- Réglage théorique d’un correcteur proportionnel et intégral, implémentation sur le système réel
TP 2.2 Validation de modèle mécanique – THEC
Objectif : Établir un modèle mécanique de l’attelle CPM-130, afin de déterminer l’expression temporelle d’un couple moteur qui permettrait d’obtenir une accélération angulaire constante pour l’articulation du genou, sans avoir recours à une boucle d’asservissement de position ou vitesse.
Termes-clés :
- Energie cinétique, inertie équivalente
- Théorème de l’énergie cinétique
- Détermination d’un modèle de frottement, quantification expérimentale
- Equation de mouvement, résolution
- Validation expérimentale de l’équation de mouvement sur un échelon de courant
- Résolution d’une problématique acausale sous SOLIDWORKS + MÉCA3D
TP 2.3 Dimensionnement de motorisation
Objectif : Vérifier le dimensionnement de la machine à courant continu faisant office d’actionneur de l’attelle de mobilisation du genou CPM-130. Le dimensionnement peut se faire selon différents critères.
Termes-clés :
- Mesure de force, lien avec le courant moteur
- Exploitation d’une équation de mouvement, résolution en t=0+
- Analyse de la loi ES non linéaire, détermination d’une position critique sur un critère d’accélération maximum
- Mesure expérimentale d’accélération, mesure d’écarts avec le modèle
- Mesure de courant et détermination numérique du couple efficace